
What is Aerial Mapping?
Vertical aerial photography (sometimes called “satellite views”, “aerial surveys”, “orthophotos” or “orthomosaics”) are photos taken straight-down (nadir) from either an aircraft or satellite. They are different than oblique aerial photography (sometimes called “bird’s eye views”), which are photographs also taken from an aircraft, but taken at an angle. Vertical aerial photographs are generally not as aesthetically-pleasing as oblique aerial photographs, but have practical applications, such as for aerial photo maps or to produce digital elevation models (DEMs).

Orthophoto of the San Diego County Fair in Del Mar, California, is a composite image of hundreds of vertical aerial photographs and processed into a single image, providing a comprehensive view of the fairgrounds and aiding in the strategic placement of booths and the management of visitor traffic.
Every Photo Mission is Custom
Our goal with every photo mission is to understand each client’s individual needs and capture the best imagery possible at a competitive price. Choosing the correct aerial platform and equipment for data collection allows us to gather large amounts of up-to-date data efficiently, minimizing costs for our clients without sacrificing on quality. No two photo missions are alike. This flexibility and years of experience allow us to safely and legally photograph all types of projects, even those within restricted airspaces or hard-to-reach locations.
Mapping Large Cities
Bespoke aerial photo maps are comprised of hundreds or thousands of individual aerial photographs, which are combined into a single image, allowing for high-resolution coverage of an entire city.
Data collected on aerial survey flights also allow for topographic modeling and land use analysis without requiring any additional flights.
High-Resolution Data Sets
By analyzing hundreds or thousands of individual photographs, we can create very detailed orthophotos. Zoom-out to see the city boundaries or zoom-in to see individual structures, all in one file!

How does it work?
Each photo mission is prepared to the custom specifications discussed with the client in advance. Multiple flight lines are generated over the proposed site, designed for high overlap between flight lines and successive images. Ground control points (GCPs), if needed, are acquired for the project (we recommend using GCPs for all projects that will be used in a CAD/GIS environment), requiring an on-site visit with a dGPS.
The mission is flown with high-resolution cameras mounted in a vertical position, pointing straight down. Once the vertical images are all captured, we return to base and begin post-processing.
The images are geotagged and sent through an advanced Structure-From-Motion (SFM) system. This system analyzes each pixel in each individual image and is able to calculate very precise camera positioning using a variety of techniques, such as Automatic Aero-Triangulation (AAT) and Bundle Block Adjustment. Using this precise camera calibration data, a rough 3D point cloud is generated and the individual camera positions are displayed, allowing for a visual quality check of the project. If everything looks good, we introduce the previously-collected ground control point data to improve accuracy and densify the 3D point cloud, which is used to generate a DSM and the subsequent orthophoto.

Ground Control Points
We recommend having high-accuracy ground control points (GCPs) for all aerial mapping projects in order for the data sets to be as accurate as possible
Post-Processing
Once a flight is completed, every pixel is processed by a specialized Structure-from-Motion (SFM) system. Advanced algorithms are able to calculate the elevation of each pixel by analyzing the movement of pixels in overlapping images

Multispectral Imagery
Specialty cameras can capture spectrums that the human eye can't see, such as Near-infrared (IR) that indicates plant stress and Far-IR which can show the differences in temperature (thermography)
Common Aerial Mapping Deliverables
- Orthophoto/Orthomosaic
- DEM (DSM/DTM)
- 3D Point Cloud
- 3D Texture Mesh
- Contour Lines
- Quality Report
Orthophoto
The orthophoto (also called an "orthomosaic" or "aerial photo map") is an orthorectified mosaic of hundreds or thousands of images, which are processed together to create one seamless map
Digital Elevation Model (DEM)
The digital elevation model (DEM) can be delivered as a digital surface model (DSM), which shows the elevations of every visible object or as a digital terrain model (DTM), which has every object that is not the ground filtered out
3D Color Point Cloud
The 3D color point cloud is almost a blend of the orthophoto and DEM, with each point having a color value and an x, y, z coordinate
3D Simplified Texture Mesh
The 3D simplified texture mesh takes the points of the 3D color point cloud and fills the space between them with 2D polygons that are projected with textures, creating a less detailed, but also much smaller 3D model

Contour Lines
Contour lines are generated from the DEM (either the DSM or DTM) and are a simplified, 2D way to illustrate elevation changes
-
City of Laguna Beach
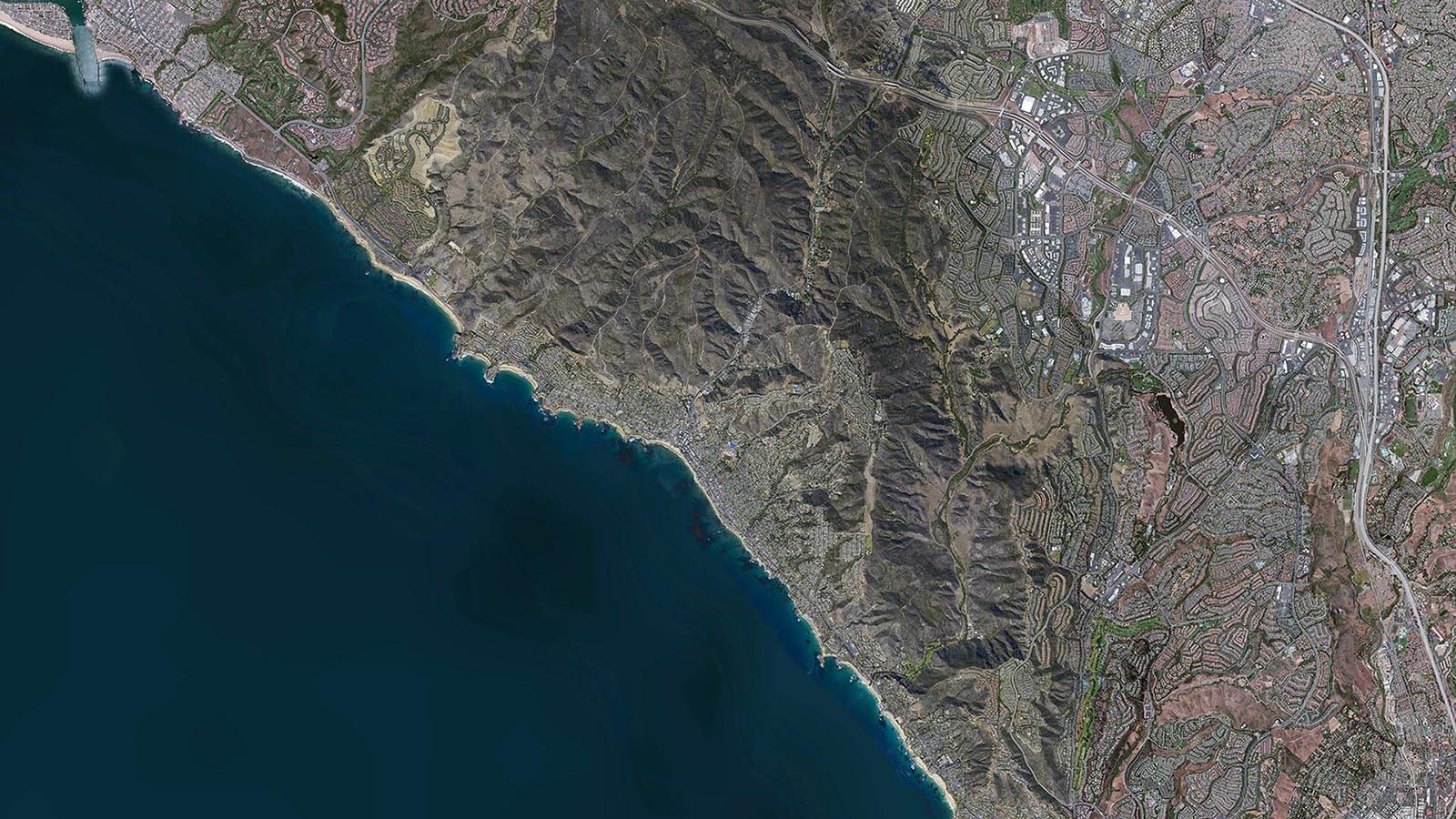
City of Laguna Beach
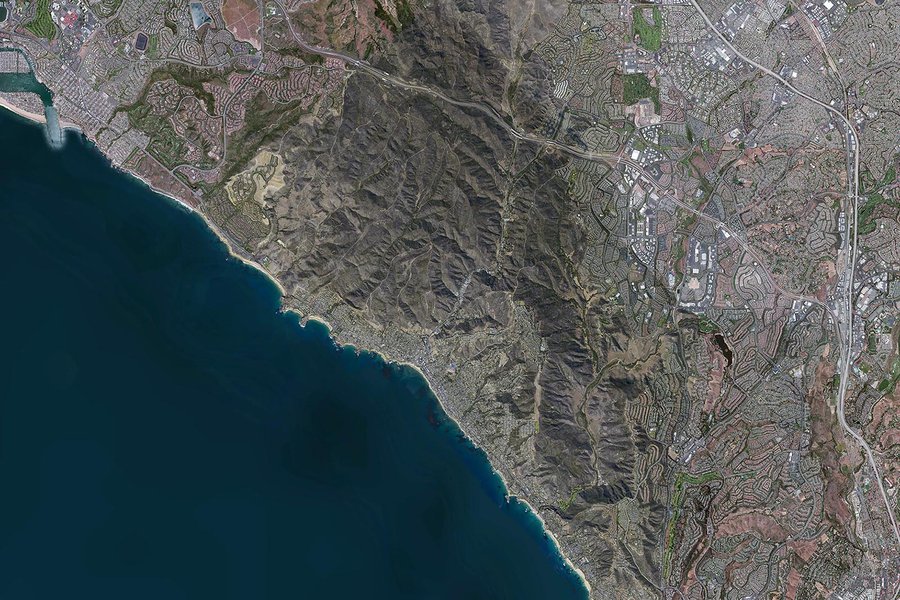
Orthophoto of Laguna Beach, California, a high-resolution composite image created by processing thousands of vertical aerial photographs into a single 3-inch resolution orthomosaic, covering a 50 square mile area and used extensively for city planning and GIS applications.
-
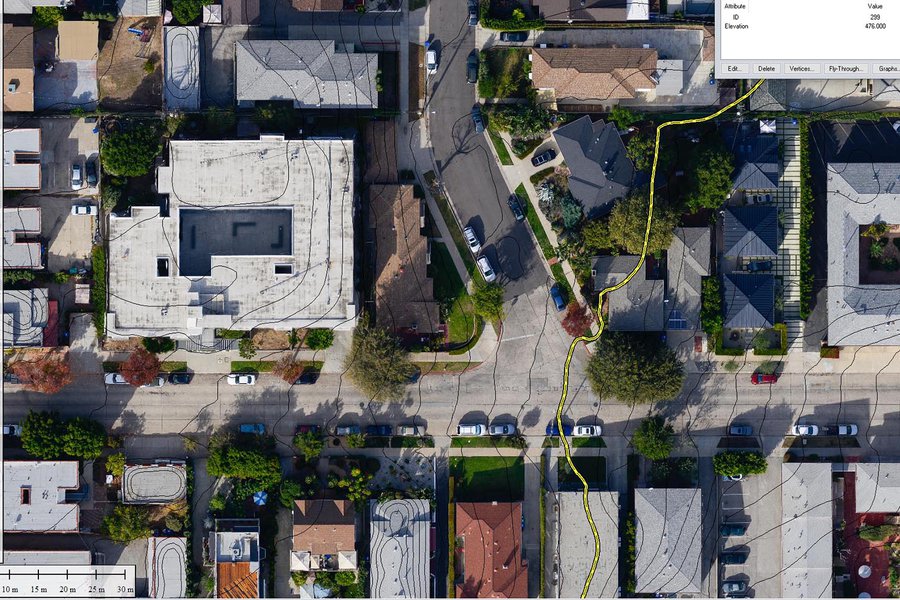
Property Line Map

Property Line Map
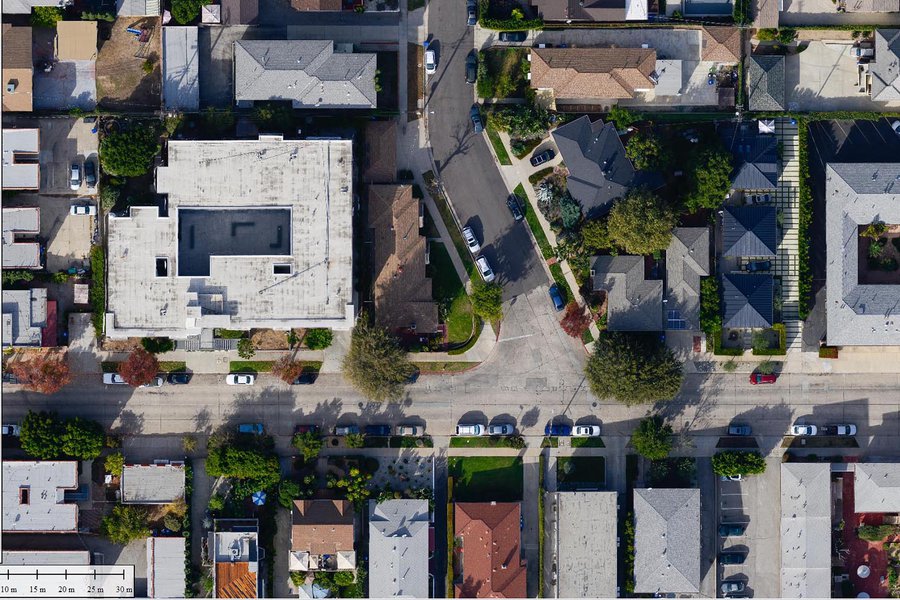
Orthophoto of a residential neighborhood in Los Feliz, California, created by combining hundreds of vertical aerial photographs with 1-inch GSD resolution and incorporating high-accuracy GPS ground control points, providing highly accurate imagery for property line dispute settlement purposes.
-
Acquiring Ground Control Points

Acquiring Ground Control Points
A dGPS is setup above an aerial target in order to acquire a high-accuracy ground control point (GCP)
-
Aerial Mapping Post-Processing
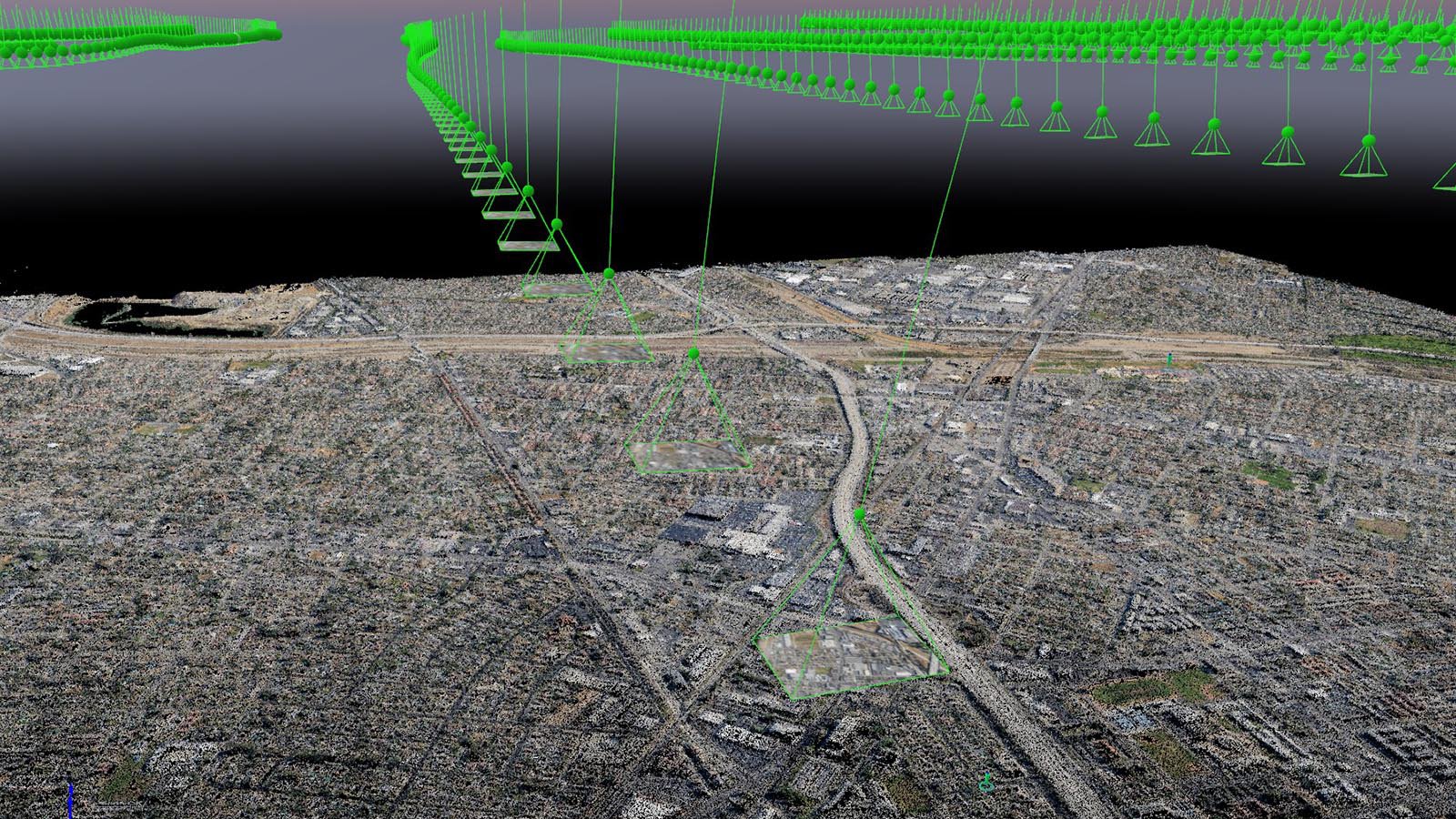
Aerial Mapping Post-Processing
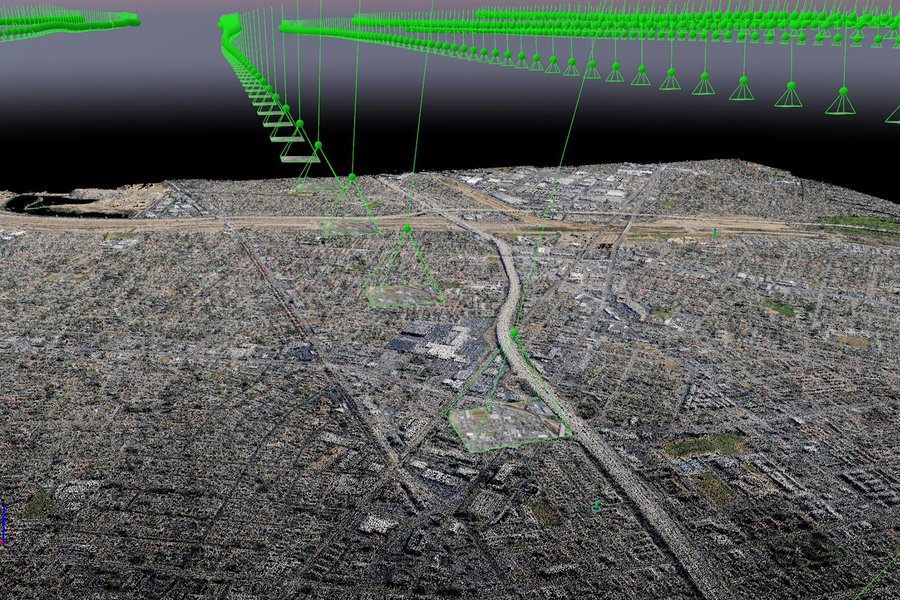
Vertical aerial photographs are individually analyzed by a Structure-from-motion (SFM) system. Camera positions can be seen above the point cloud, allowing for a visual quality check
-
Near IR Mapping Golf Course

Near IR Mapping Golf Course
A multi-spectral image of a golf course in Mission Viejo, California. Near-IR (infrared) imagery shows the chlorophyll content of plants in red, which is used to determine plant stress
-
Orthophoto / Orthomosaic
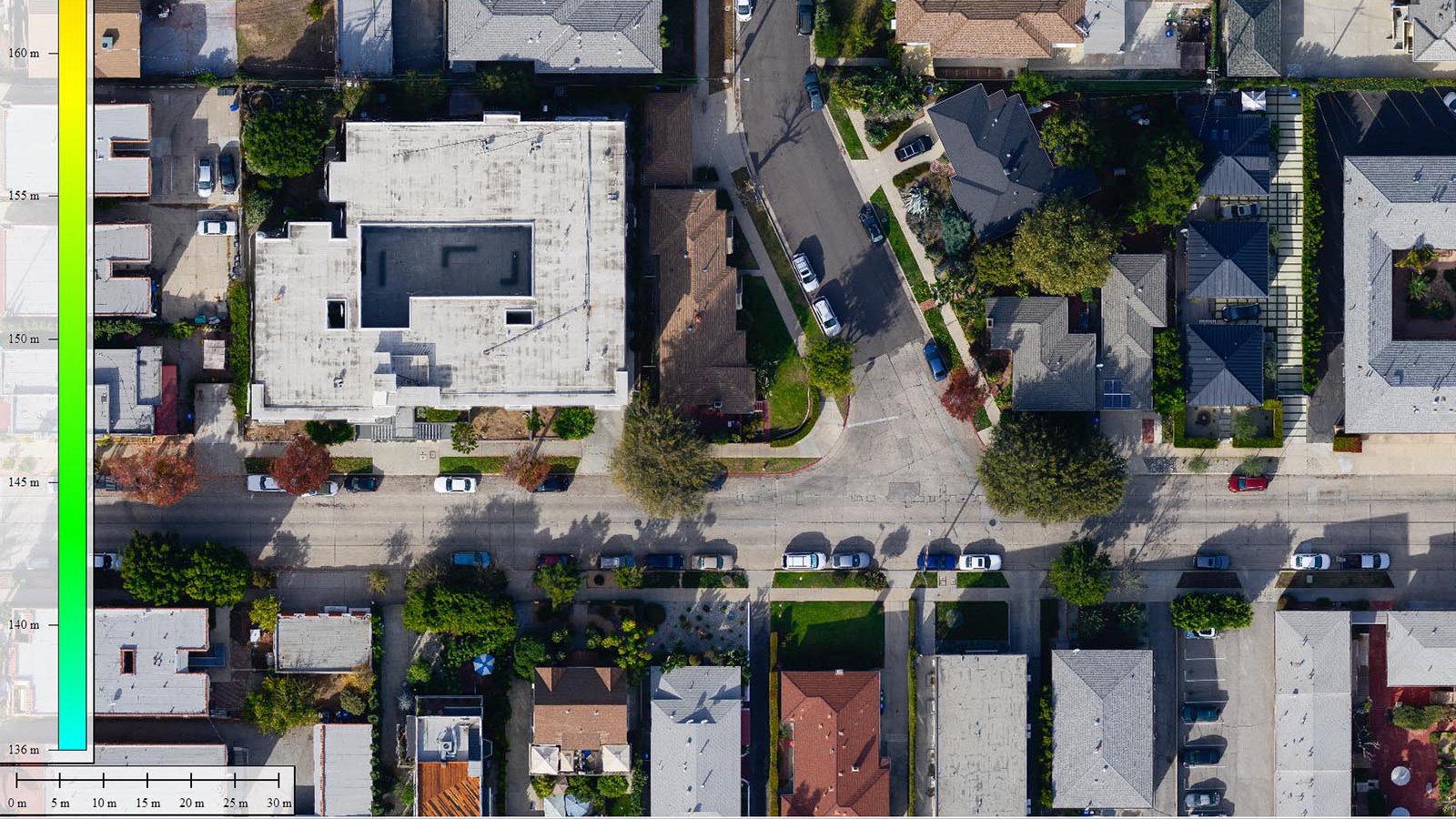
Orthophoto / Orthomosaic
Comprised of hundreds or thousands of individual images, an orthophoto can be used for 2D measurements. It features a uniform scale and corrects for perspective changes that cause distortions like building tilt
-
Digital Elevation Model (DEM)
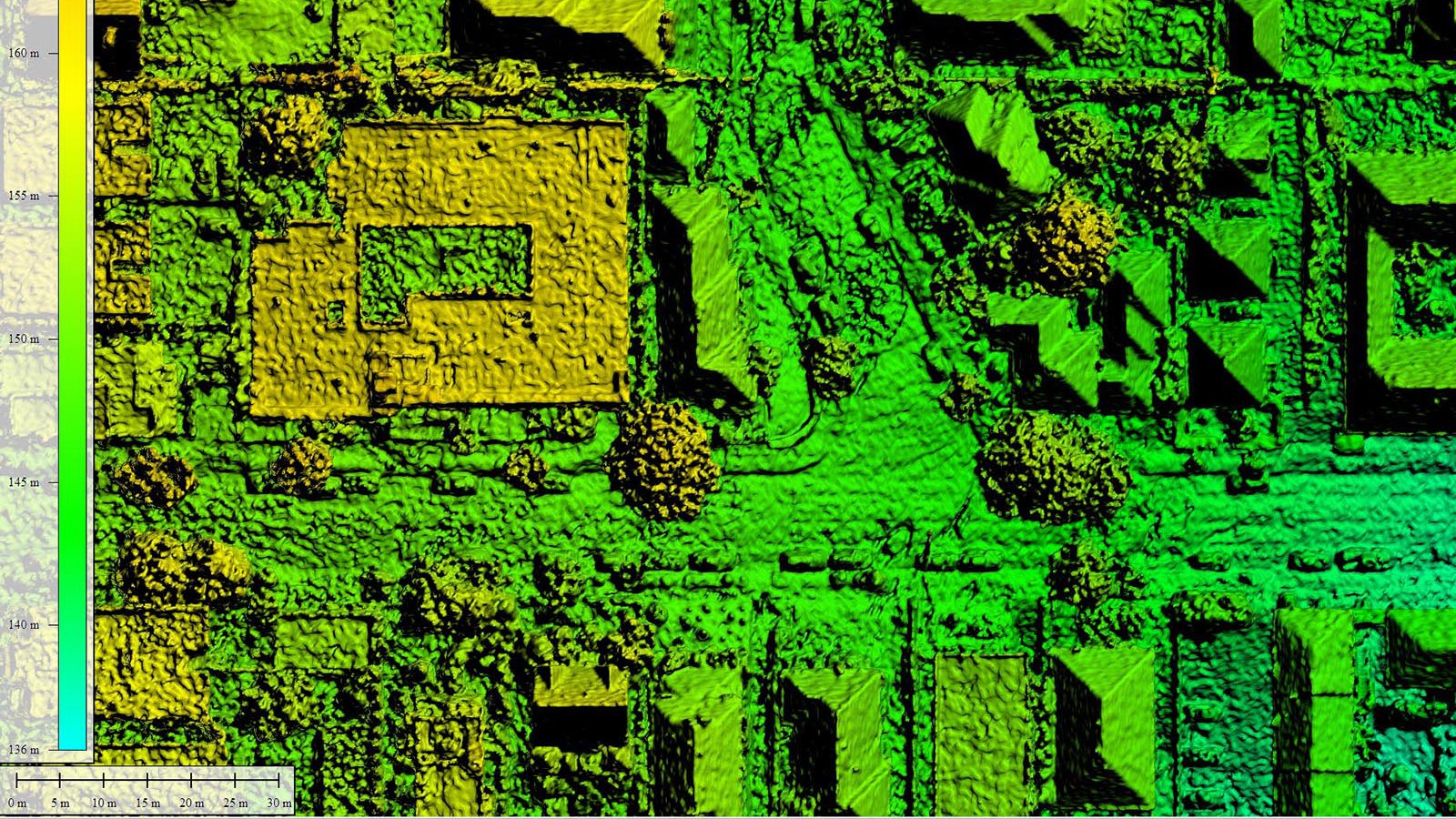
Digital Elevation Model (DEM)
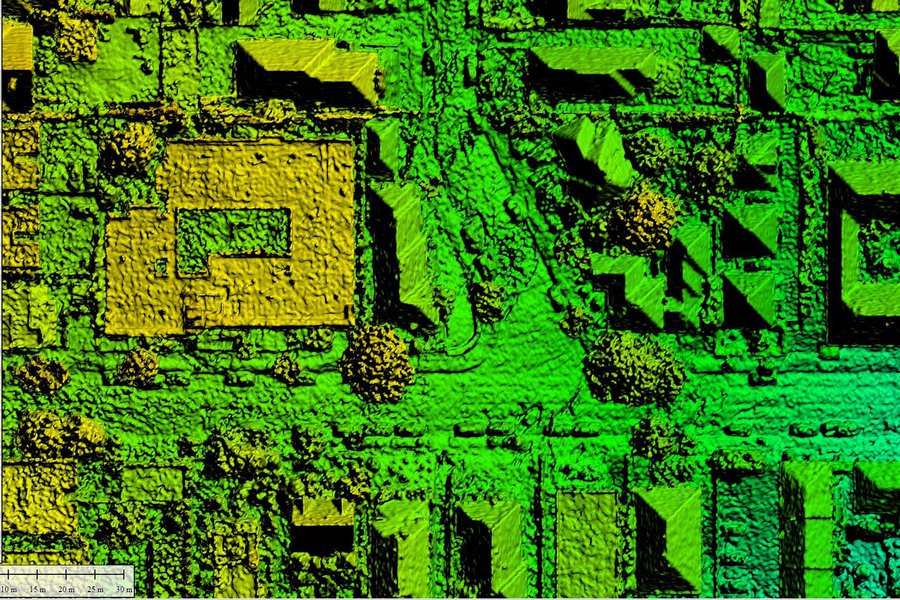
This Digital Elevation Model (DEM), specifically a digital surface model (DSM), is a 3D representation of computed elevations, traditionally represented as a color heat map
-
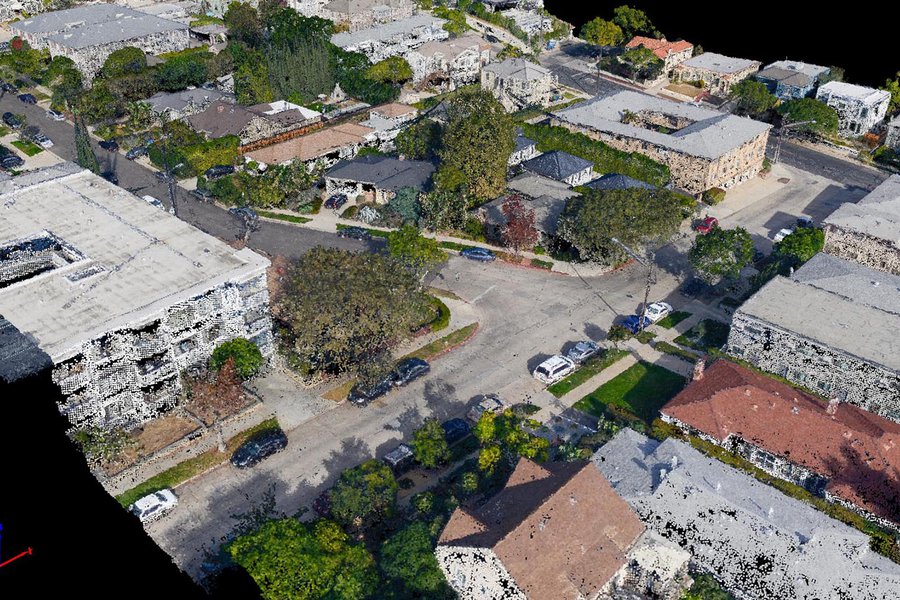
3D Color Point Cloud

3D Color Point Cloud
The millions of points generated by a Structure-from-Motion system are reconstructed in an interactive 3D model. Each point has a color value and x, y, z coordinate
-
3D Texture Mesh

3D Texture Mesh
A 3D model that utilizes polygons for shape and projects textures on them, a 3D texture mesh is useful for presentation purposes. With much smaller files than a 3D point cloud, texture meshes are intended to be more visually appealing rather than accurate
-
Contour Lines
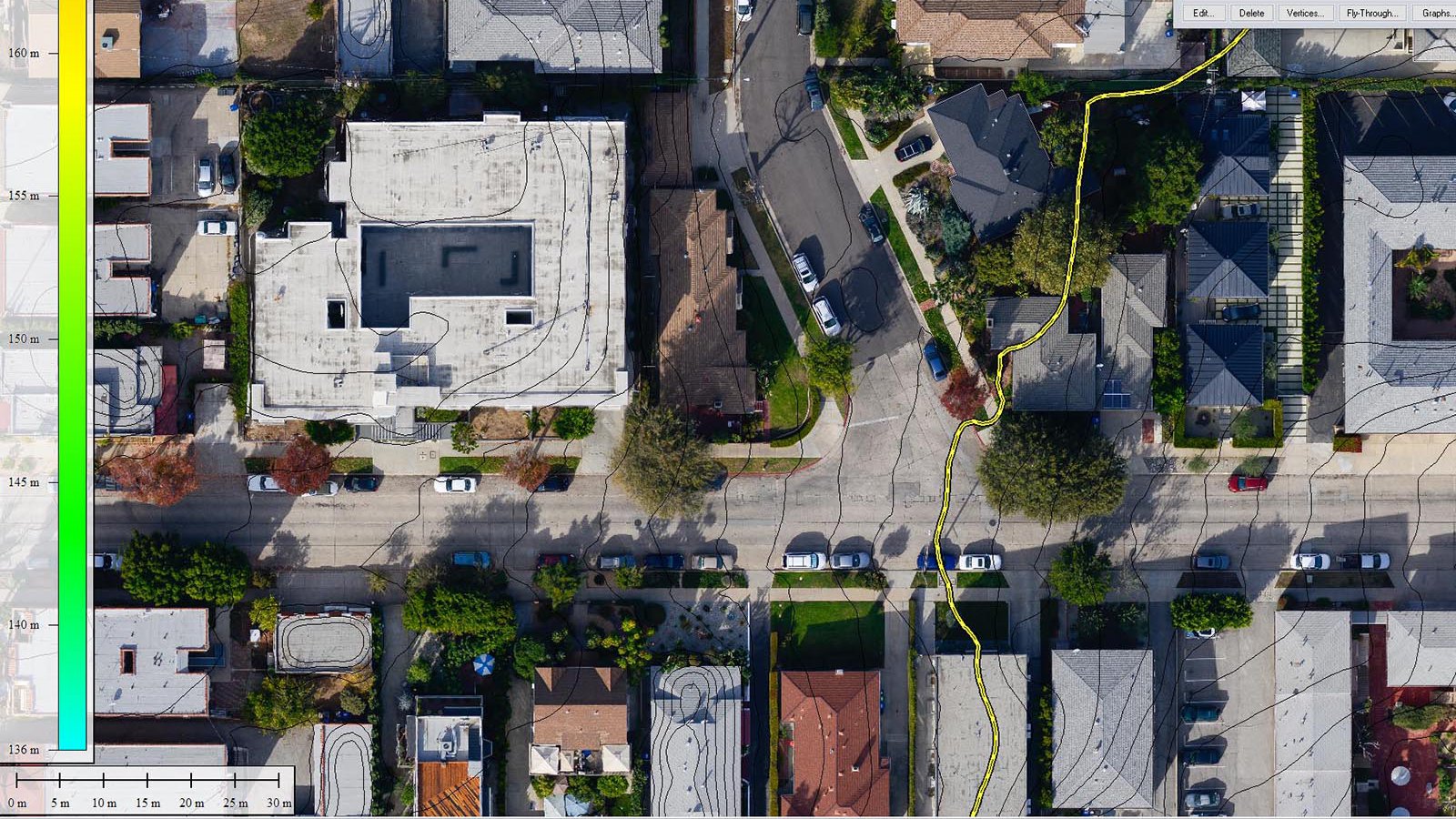
Contour Lines
Contour lines (also called polylines) are typically used to measure distances or indicate elevations in a 2D format